5s
+1
Submission successful!




Méthode de refroidissement: Refroidissement par air
Classification des diplômes: Pour la protection contre la corrosion
Puissance nominale: 10 kW
Matériel de lame: Alliage d'aluminium
type: Générateur d'énergie éolienne
puissance nominale: 300w-30kw
Couple de début: Pour les appareils à combustion
Tension locale évaluée: Le réglage de la tension doit être effectué à l'aide d'un régulateur de tension.
Vitesse du vent évaluée: 11.5 M/s
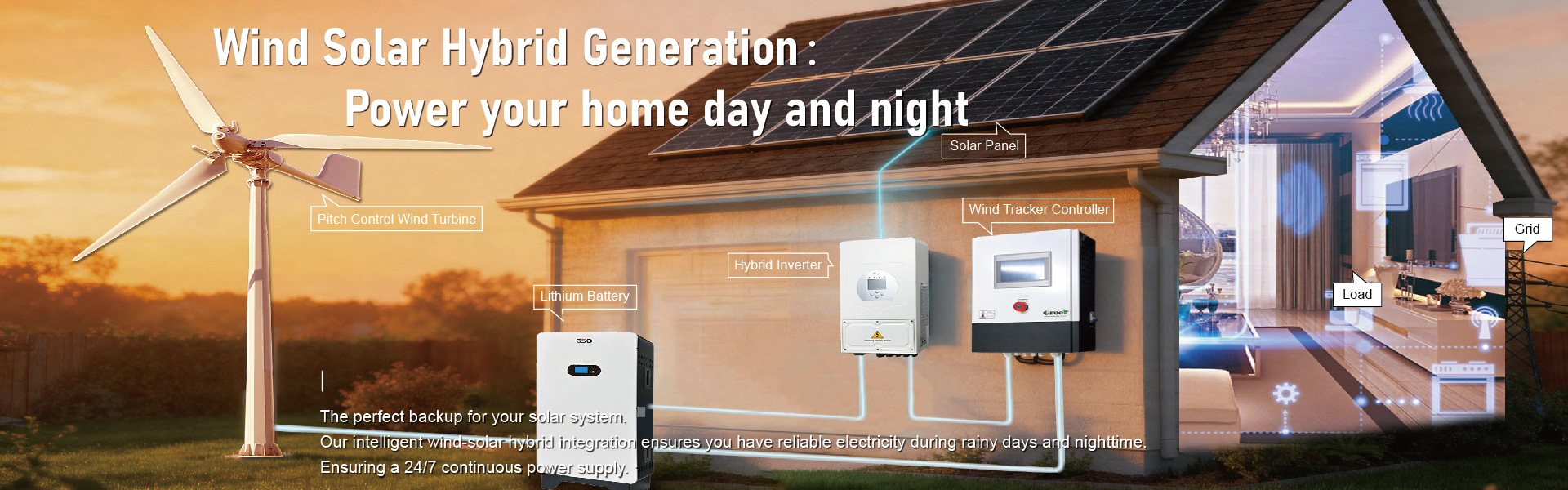
Nom du produit: Convertisseur hybride
Puissance nominale (KW): 100kw/150kw/200kw/250kw/300kw/500kw/600kw/700kw/800kw/1000kw
Fréquence de sortie: 50 Hz / 60 Hz


 english
english
 français
français
 Deutsch
Deutsch
 Italiano
Italiano
 Русский
Русский
 Español
Español
 português
português
 Nederlandse
Nederlandse
 ελληνικά
ελληνικά
 日本語
日本語
 한국
한국
 العربية
العربية
 हिन्दी
हिन्दी
 Türkçe
Türkçe
 indonesia
indonesia
 tiếng Việt
tiếng Việt
 ไทย
ไทย
 বাংলা
বাংলা
 فارسی
فارسی
 polski
polski


